Industry
Services
Project: Collaborating for a better robotic hand
In collaboration with FTN (The Faculty of Technical Sciences, Novi Sad), The University of Nis, and Sigmoid company, HTEC designed and built a soft-grab three-finger robotic hand for warehouses and manufacturing. The Innovation Fund of Serbia funded this robotics research and development project.
Challenge: Robotics comes with steep learning curve
The idea for this project came from Ph.D. Mirko Rakovic and his company, Sigmoid. In addition to specializing in software development and product development for different robotic applications, Sigmoid develops software for various clients as well as its own software products.
Mirko is associate professor of robotics at FTN and one of the leading researchers and experts in the field of robotics in Europe. His mission is to perfect the robotic soft grab, a much sought after technology innovation in the warehousing industry.
HTEC Group joined the project to help Sigmoid’s team develop technology that would provide a cost-effective and production-ready three-finger robotic hand. The project is now at its last stage of development and will soon be commercialized.
As one can imagine, with an innovative project like this, the team was faced with many challenges.
First, most of HTEC’s engineers had never worked on an industrial robot before. They were mostly involved in telecoms and IoT product development, medical devices, and servers. This was an exciting new area, but the team needed to understand the world of industrial robotics from the bottom up, and dive into the complexities of robotic electronics.
One of HTEC’s team members, David Senicic, had previous experience working on industrial robotics during the RAMPup project under H2020 and his insights were highly valued throughout the project.

Force-based insertion was one of the modules that I have worked on before HTEC. This is only one of the pain points that require new ideas and solutions in the robotics field. Tracking forces and moments to try to pick and place an object was not an easy task. Our three-finger hand solution/soft robotics gripper is more adaptable for a wide range of industry problems.
– David Senicic on the complexities of robotic hand development
Secondly, the system architecture for this kind of product is extremely complex and hard to predict. HTEC’s solution needed an experimental approach requiring a lot of initial research and trial and error.
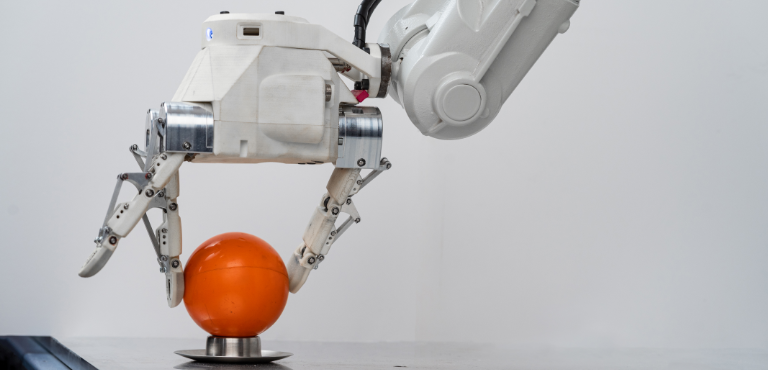
Choosing, procuring, building, and combining all the complex components of the robotic hand demanded attention to detail. HTEC’s goal was to make the hand light but strong, with sophisticated grabbing features so that it could grab and carry a variety of shapes, sizes, and weights — from something as small as a berry or as bulky as a bag of fruit — without dropping or squeezing it. HTEC has invested a great deal of time and effort to understanding every known type of human grip and the logic behind something as seemingly simple as the shape and movement of the human hand.
Finally, control over the movement of the robotic hand needed to be fully automated and self-aware with the help of sensors and complicated communication protocols.
When research and development take place in an entirely green field of innovation, where radically new ideas are being tested, the biggest challenge is usually finding the available necessary materials and parts or making them.
Solution: Talented teams join forces
Working together with the most accomplished robotics scientists in the country, the HTEC team was able to excel in the following areas of robotics:
1. Hardware design
HTEC designed the shape of fingers, levers, and the mechanics. The team had elegance in mind when designing a prototype scheme.
2. Electronics
When doing sensor signal processing and translating the signal to automated control, HTEC made sure to adhere to industry standard protocols.
3. Sensor development
HTEC is proud to say that this is probably the first robotics project in the world to develop special types of sensors for use on robotic hands. HTEC added specially designed sensors to the fingertips so that the hand can “feel” the shape and surface of an object. The robotic hand can predict the force and type of grip needed and the location of the item that needs to be gripped.
According to HTEC knowledge and research, this approach was the first of its kind in the world, and by using the newest materials, the soft-grab three-finger robotic hand is more affordable than other available options.
4. Consulting, idea validation, planning, and help in production
Needless to say, this exciting project required a lot of brain power from two faculties and two companies joining forces to do research and make decisions.
HTEC’s team was led by robotics expert, Darko Todorovic, the head of engineering and delivery at HTEC. Darko is also currently working on his PhD dissertation in human-robot interaction anticipation with application in collaborative robotics at the University of Nis, where he also teaches in the department of control systems and leads the robotics laboratory.
Darko has a special interest in the application of AI (artificial intelligence), machine learning, and data science in business digitalization across industries with a specialization in IoT and robotics. As mentioned earlier, the project was also led by Ph.D. Mirko Rakovic and his company Sigmoid, in collaboration with the faculty of technical sciences in Novi Sad and the University of Nis.
Success: Delivering a commercially viable robotic hand
The biggest successes for HTEC Group on this project were the speed of innovation, fast iterations, new technology discovery and design, and the use of industry standards. The HTEC team was able to develop a completely new technology in a short period of time (the project started in 2019) and create a commercially applicable robotic hand that will be tested in the world’s best automated warehouses.
On the whole, the hope for this product is to reduce the need for “slavery” work in warehouses and leave menial factory work to smart machines.
HTEC developed one of the most advanced, affordable, and flexible robotic grippers with small funding but a brilliant team of university professors, students, the company Sigmoid, and HTEC engineers.
Want to learn more about how HTEC’s technology expertise can transform your business? Explore our Product Engineering and Industrial & Robotics capabilities.