 M: Tell us more about the Robotic Hand. What range of motion does it have, and how reliably does it operate?
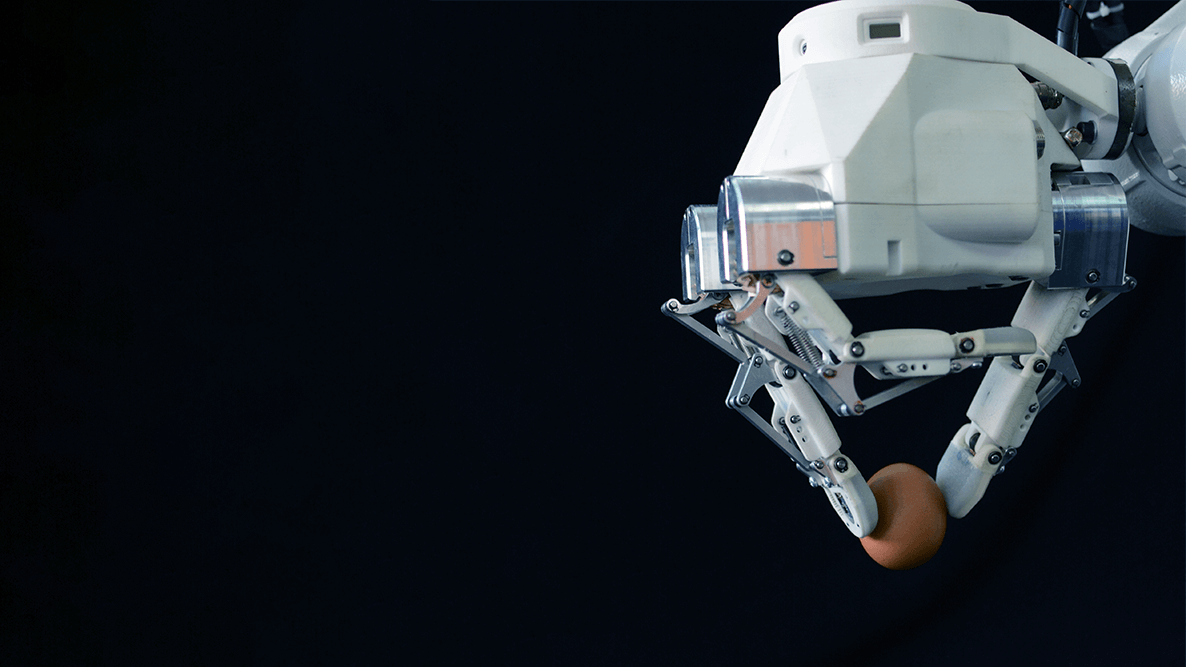
M: “We did a few first grasps that showed the ability of the hand to grasp objects of very high weight of up to four kilograms. So the hand itself is designed as a three finger hand. We analyzed what is a minimum number of fingers that we need in order to cover several basic grasps that humans can perform. Those are power grasp or ball grasp, then cylindrical grasp, etc. We identified movements of the finger and how many fingers we need in order to cover all the basic types of grasps that a human can perform. And we came to a conclusion that three fingers is good enough. One is a thumb that has the ability to rotate compared to the other two fingers. Each finger has three segments that can adapt its shape around the object that is being grasped. Thus, we are able to grasp objects that are of different irregular shapes.”
M: How did HTEC Group help bring this solution to life?
M: “HTEC did what I think was very important to us. We did not have competencies in designing industrial grade electronics. On the other hand, HTEC has experience in designing electronics for robotics, for motor control, etc. So it was a mix of experiences. We brought to the table all the knowledge that we have regarding controlling motors, interfacing encoders, and other details related to electronics for robotic applications, whereas HTEC brought their knowledge and extensive experience in very fast design that is following all the necessary checks on the availability of the components, manufacturing, while taking care of all the standards related to the PCB that should satisfy the certification checks. We brought skills in motor control and software that needed to run on that PCB. This was kind of a mixed quest.”
M: What makes Robotic Hand stand out from the rest of similar solutions on the market?
M: “We started with a design of the fingers that have sensors at their fingertips which is important for the grasp control. If you are grasping an object, sometimes we don’t need a vision, but we need a sense of touch. And our hand is designed in such a way that it has sensors at each fingertip. These sensors provide the feedback, the information about the contact force and its location. This gives us information whether we have grasped the object properly so that we can safely manipulate it in the environment. Other hands are usually using feedback from motors, which is not good enough.”
M: Is the Robotic Hand a cheaper option than its competitors on the market?
M: “That’s true. It’s a cheaper option. But when we are talking about sensing capabilities, it actually provides richer information. Others can measure one component of the force — they actually do not measure the force, they are estimating it from the current of the motor. We are measuring the force at the point where it appears. For instance, if you are holding a cup, are you measuring the contact force by the used strength of the muscle in the arm or by feeling it from the fingertip? We are definitely not measuring from the used strength of the muscle. Also you cannot measure the location of the force. With our sensors in the fingertip we are providing richer information that gives us insights into the quality of the grasp.
We successfully demonstrated object grasps with the hand…we are able to grasp different objects in size and shape and move it from one place to another. Now we are in the phase of assembling a second version of the prototype with the better mechanical components. The goal is to have new demos and new use cases by the end of August this year…”
M: How do you think Robotic Hand will impact the industry?
M: “A hand can be used for both, applications that require simple grasps as well as for applications that require flexibility. Pick and place operation is the most widely used application in robotics. If we have a production line where we have different products coming on the line, it is preferred to have a hand that is able to manipulate each of them. Another interesting application could be machine tending. If a company is manufacturing metal parts with various size shapes, a robotic hand that can manipulate all of the objects with one tool, i.e. hand, would easily increase the level of automation in the production process. The conclusion is, our hand can be used for different applications — whoever requires a robot with a hand that has a capability to pick and manipulate objects of different shape, and weight.”
M: What would you say is the ultimate benefit of the Robotic Hand on the business side?
M: “Clients do not want to buy a technology that will not do the job for them. We want to go for the business model that will simplify clients’ decision for investing in automation by charging for what the robotic hand accomplished, i.e. a charge per outturn.”
M: Do you plan to work (partner) with HTEC Group on any other projects some time in future?
M: “We are already collaborating on one project and I’m sure that our future collaboration will bring much value and great results not only to us but also to our future clients.”
M: Tell us more about the Robotic Hand. What range of motion does it have, and how reliably does it operate?
M: “We did a few first grasps that showed the ability of the hand to grasp objects of very high weight of up to four kilograms. So the hand itself is designed as a three finger hand. We analyzed what is a minimum number of fingers that we need in order to cover several basic grasps that humans can perform. Those are power grasp or ball grasp, then cylindrical grasp, etc. We identified movements of the finger and how many fingers we need in order to cover all the basic types of grasps that a human can perform. And we came to a conclusion that three fingers is good enough. One is a thumb that has the ability to rotate compared to the other two fingers. Each finger has three segments that can adapt its shape around the object that is being grasped. Thus, we are able to grasp objects that are of different irregular shapes.”
M: How did HTEC Group help bring this solution to life?
M: “HTEC did what I think was very important to us. We did not have competencies in designing industrial grade electronics. On the other hand, HTEC has experience in designing electronics for robotics, for motor control, etc. So it was a mix of experiences. We brought to the table all the knowledge that we have regarding controlling motors, interfacing encoders, and other details related to electronics for robotic applications, whereas HTEC brought their knowledge and extensive experience in very fast design that is following all the necessary checks on the availability of the components, manufacturing, while taking care of all the standards related to the PCB that should satisfy the certification checks. We brought skills in motor control and software that needed to run on that PCB. This was kind of a mixed quest.”
M: What makes Robotic Hand stand out from the rest of similar solutions on the market?
M: “We started with a design of the fingers that have sensors at their fingertips which is important for the grasp control. If you are grasping an object, sometimes we don’t need a vision, but we need a sense of touch. And our hand is designed in such a way that it has sensors at each fingertip. These sensors provide the feedback, the information about the contact force and its location. This gives us information whether we have grasped the object properly so that we can safely manipulate it in the environment. Other hands are usually using feedback from motors, which is not good enough.”
M: Is the Robotic Hand a cheaper option than its competitors on the market?
M: “That’s true. It’s a cheaper option. But when we are talking about sensing capabilities, it actually provides richer information. Others can measure one component of the force — they actually do not measure the force, they are estimating it from the current of the motor. We are measuring the force at the point where it appears. For instance, if you are holding a cup, are you measuring the contact force by the used strength of the muscle in the arm or by feeling it from the fingertip? We are definitely not measuring from the used strength of the muscle. Also you cannot measure the location of the force. With our sensors in the fingertip we are providing richer information that gives us insights into the quality of the grasp.
We successfully demonstrated object grasps with the hand…we are able to grasp different objects in size and shape and move it from one place to another. Now we are in the phase of assembling a second version of the prototype with the better mechanical components. The goal is to have new demos and new use cases by the end of August this year…”
M: How do you think Robotic Hand will impact the industry?
M: “A hand can be used for both, applications that require simple grasps as well as for applications that require flexibility. Pick and place operation is the most widely used application in robotics. If we have a production line where we have different products coming on the line, it is preferred to have a hand that is able to manipulate each of them. Another interesting application could be machine tending. If a company is manufacturing metal parts with various size shapes, a robotic hand that can manipulate all of the objects with one tool, i.e. hand, would easily increase the level of automation in the production process. The conclusion is, our hand can be used for different applications — whoever requires a robot with a hand that has a capability to pick and manipulate objects of different shape, and weight.”
M: What would you say is the ultimate benefit of the Robotic Hand on the business side?
M: “Clients do not want to buy a technology that will not do the job for them. We want to go for the business model that will simplify clients’ decision for investing in automation by charging for what the robotic hand accomplished, i.e. a charge per outturn.”
M: Do you plan to work (partner) with HTEC Group on any other projects some time in future?
M: “We are already collaborating on one project and I’m sure that our future collaboration will bring much value and great results not only to us but also to our future clients.”
The Rise of the Soft-Grab Robotic Hand: The Story Behind
As the push to go digital in various aspects of our lives intensifies, the need for companies to empower their employees with technologies is on the rise. Technologies like robotics, AI, and IoT are on their mission to redefine businesses and help free people’s hands from tedious tasks they have been performing in factories for a long time.
Robots are extraordinarily helpful machines — they can help increase safety, reduce costs, increase efficiency, enhance productivity, address labor shortage and perform routine tasks. Being driven by our mission to choose projects that can make a groundbreaking impact on the industry, we decided to join our strengths with partners and work on developing a flexible robotic hand. In collaboration with the Faculty of Technical Sciences (the University of Novi Sad), the Faculty of Electronic Engineering (University of Nis), and company Sigmoid from Novi Sad, and powered by the Innovation Fund in Serbia we achieved a tremendous success, and are on our journey to bring the project to new heights and launch it on the market in the upcoming period.
The idea for this project came from Ph.D. Mirko Rakovic, Associate Professor of Robotics at FTN, and a Co-Founder of Sigmoid doo. To get all the behind-the-scenes details and find out more about this fruitful collaboration and amazing project we are all proud of, we talked with Mirko Rakovic on how this idea was born, the partnership between our two companies and the decision to apply for the funding from the EU.
M: You are a co-founder of Sigmoid, an innovative company from Novi Sad. Can you tell us a little bit more about what you do?
M: “The company was established back in 2017, so we are kind of a startup, still a small company growing with partners such as HTEC Group. Our main focus is directed toward robotics and software development. So those are two main main departments that we have within our company. And all the clients are doing their business in the field focused around those two areas. We work on software development and product development for different robotic applications, software development for various clients and on development of our own software products”.
M: How was the idea for building a Robotic Hand born?
M: “So I am coming from academia, I am a professor in robotics and am really passionate about robotics in general. I follow everything that is happening in the area of robotics. One of the main bottlenecks for flexible automation is the ability to replicate the same flexibility of what the human hand can do in terms of dexterity, and combine it with the precision and repeatability of robotic arms.
The technology of robotic arms is already advanced to the level where there are no significant improvements anymore. But the robotic hand, its dexterity and its ability to manipulate different shapes with different size, different weight is still a gap and open problem. So usually when we have a robotic application, we also have a design of a dedicated robotic hand or a gripper or a tool to perform specific activities. We are coming to the point where robotic hands and arms should manipulate many various objects. And we wanted to answer that challenge. We wanted to come up with a hand that is able to pick a small box but at the same time to be able to manipulate a bottle of liquid or soft fruits and vegetables. So this means that we wanted to be a step closer to the capabilities of the human hand. This is what we identified as a gap, and what motivated us to come up with this idea.”
M: This was done in collaboration with the universities in Novi Sad and Nis. So how did the collaboration go?
M: “So as you know, I’m a co-founder of Sigmoid and I work as associate professor of robotics at the Faculty of Technical Sciences in Novi Sad. I have a team in my company, but also there is a team of my colleagues at the faculty. This is the half of the story. I’m also collaborating with Darko Todorovic from HTEC Group, a Director of Engineering and Delivery, who is also very much connected with the Faculty of Electronics Engineering from Nis. So the other half of the story comes from Darko. This is where he brought HTEC and faculty from Nis. This is how the consortium was established. This project requires a lot of research as well. So we had to include young researchers from the universities to be backed up by industry oriented engineers. As a result of our discussions we applied to the call from Innovation Fund, that is promoting collaboration between industry partners and university partners. This guided us to the preparation of the project proposal.”
M: Why did you choose HTEC Group to work on this project?
M: “…I met Darko at the University of Nis. We talked about what we were working on and then we identified a potential client whose main challenge was how to manipulate various objects. I already told them about our previous project where we designed a five finger hand similar to the human hand. As a result we merged these two stories into one. One of the important aspects of the robotic hand is a sensor that is at the fingertips of each finger. The innovation of the project is built around this idea, and this is how we evolved into a consortium that is developing a flexible robotic hand.”
M: So you had a commercial application in mind from the start?
M: “Yes, from the very beginning, we had a market that we were focused on — a flexible robotic hand. We did the research of our competition, and we identified that there is room for another product that could compete with others.”
M: How close are we bringing this product to the market right now?
M: ”..We definitely see improvements that could be done, but initial expectations on the technical side are already met. There is a grade for technology readiness level in the EU from one to ten, and I think we are somewhere around between eight and nine. So we will definitely need to do one one more redesign before batch manufacturing… Now the parts are designed for small batches, for a few pieces to be manufactured, and we currently can’t say much about a high volume production at this stage.”
M: What was the biggest challenge you had to overcome during the project and how did you solve it?
M: “Well, robotics is a multidisciplinary area, you have to combine software, hardware and mechanical parts and they need to breathe as a one system. So if we fail in mechanics, we cannot fix it with software and vice versa. One of the challenges was to carefully push all the critical components of the system in parallel, not to fail on any of those. We had to make good progress in the design of electronics, which was done by the HTEC Group.
Then we had to push proper design in mechanics and manufacturing of all the parts which was done by the Faculty of Technical Sciences and Sigmoid. And we had to push software development, which was done by Sigmoid with support from the Faculty of Electronics from University of Nis. So the main problem or main issue was to manage that all the pieces are progressing well….It was a joint effort. In this stage of the development, we didn’t outsource the assembly because this had to be done by the designers themselves. They had this in mind while designing.”
M: Tell us more about the Robotic Hand. What range of motion does it have, and how reliably does it operate?
M: “We did a few first grasps that showed the ability of the hand to grasp objects of very high weight of up to four kilograms. So the hand itself is designed as a three finger hand. We analyzed what is a minimum number of fingers that we need in order to cover several basic grasps that humans can perform. Those are power grasp or ball grasp, then cylindrical grasp, etc. We identified movements of the finger and how many fingers we need in order to cover all the basic types of grasps that a human can perform. And we came to a conclusion that three fingers is good enough. One is a thumb that has the ability to rotate compared to the other two fingers. Each finger has three segments that can adapt its shape around the object that is being grasped. Thus, we are able to grasp objects that are of different irregular shapes.”
M: How did HTEC Group help bring this solution to life?
M: “HTEC did what I think was very important to us. We did not have competencies in designing industrial grade electronics. On the other hand, HTEC has experience in designing electronics for robotics, for motor control, etc. So it was a mix of experiences. We brought to the table all the knowledge that we have regarding controlling motors, interfacing encoders, and other details related to electronics for robotic applications, whereas HTEC brought their knowledge and extensive experience in very fast design that is following all the necessary checks on the availability of the components, manufacturing, while taking care of all the standards related to the PCB that should satisfy the certification checks. We brought skills in motor control and software that needed to run on that PCB. This was kind of a mixed quest.”
M: What makes Robotic Hand stand out from the rest of similar solutions on the market?
M: “We started with a design of the fingers that have sensors at their fingertips which is important for the grasp control. If you are grasping an object, sometimes we don’t need a vision, but we need a sense of touch. And our hand is designed in such a way that it has sensors at each fingertip. These sensors provide the feedback, the information about the contact force and its location. This gives us information whether we have grasped the object properly so that we can safely manipulate it in the environment. Other hands are usually using feedback from motors, which is not good enough.”
M: Is the Robotic Hand a cheaper option than its competitors on the market?
M: “That’s true. It’s a cheaper option. But when we are talking about sensing capabilities, it actually provides richer information. Others can measure one component of the force — they actually do not measure the force, they are estimating it from the current of the motor. We are measuring the force at the point where it appears. For instance, if you are holding a cup, are you measuring the contact force by the used strength of the muscle in the arm or by feeling it from the fingertip? We are definitely not measuring from the used strength of the muscle. Also you cannot measure the location of the force. With our sensors in the fingertip we are providing richer information that gives us insights into the quality of the grasp.
We successfully demonstrated object grasps with the hand…we are able to grasp different objects in size and shape and move it from one place to another. Now we are in the phase of assembling a second version of the prototype with the better mechanical components. The goal is to have new demos and new use cases by the end of August this year…”
M: How do you think Robotic Hand will impact the industry?
M: “A hand can be used for both, applications that require simple grasps as well as for applications that require flexibility. Pick and place operation is the most widely used application in robotics. If we have a production line where we have different products coming on the line, it is preferred to have a hand that is able to manipulate each of them. Another interesting application could be machine tending. If a company is manufacturing metal parts with various size shapes, a robotic hand that can manipulate all of the objects with one tool, i.e. hand, would easily increase the level of automation in the production process. The conclusion is, our hand can be used for different applications — whoever requires a robot with a hand that has a capability to pick and manipulate objects of different shape, and weight.”
M: What would you say is the ultimate benefit of the Robotic Hand on the business side?
M: “Clients do not want to buy a technology that will not do the job for them. We want to go for the business model that will simplify clients’ decision for investing in automation by charging for what the robotic hand accomplished, i.e. a charge per outturn.”
M: Do you plan to work (partner) with HTEC Group on any other projects some time in future?
M: “We are already collaborating on one project and I’m sure that our future collaboration will bring much value and great results not only to us but also to our future clients.”
M: Tell us more about the Robotic Hand. What range of motion does it have, and how reliably does it operate?
M: “We did a few first grasps that showed the ability of the hand to grasp objects of very high weight of up to four kilograms. So the hand itself is designed as a three finger hand. We analyzed what is a minimum number of fingers that we need in order to cover several basic grasps that humans can perform. Those are power grasp or ball grasp, then cylindrical grasp, etc. We identified movements of the finger and how many fingers we need in order to cover all the basic types of grasps that a human can perform. And we came to a conclusion that three fingers is good enough. One is a thumb that has the ability to rotate compared to the other two fingers. Each finger has three segments that can adapt its shape around the object that is being grasped. Thus, we are able to grasp objects that are of different irregular shapes.”
M: How did HTEC Group help bring this solution to life?
M: “HTEC did what I think was very important to us. We did not have competencies in designing industrial grade electronics. On the other hand, HTEC has experience in designing electronics for robotics, for motor control, etc. So it was a mix of experiences. We brought to the table all the knowledge that we have regarding controlling motors, interfacing encoders, and other details related to electronics for robotic applications, whereas HTEC brought their knowledge and extensive experience in very fast design that is following all the necessary checks on the availability of the components, manufacturing, while taking care of all the standards related to the PCB that should satisfy the certification checks. We brought skills in motor control and software that needed to run on that PCB. This was kind of a mixed quest.”
M: What makes Robotic Hand stand out from the rest of similar solutions on the market?
M: “We started with a design of the fingers that have sensors at their fingertips which is important for the grasp control. If you are grasping an object, sometimes we don’t need a vision, but we need a sense of touch. And our hand is designed in such a way that it has sensors at each fingertip. These sensors provide the feedback, the information about the contact force and its location. This gives us information whether we have grasped the object properly so that we can safely manipulate it in the environment. Other hands are usually using feedback from motors, which is not good enough.”
M: Is the Robotic Hand a cheaper option than its competitors on the market?
M: “That’s true. It’s a cheaper option. But when we are talking about sensing capabilities, it actually provides richer information. Others can measure one component of the force — they actually do not measure the force, they are estimating it from the current of the motor. We are measuring the force at the point where it appears. For instance, if you are holding a cup, are you measuring the contact force by the used strength of the muscle in the arm or by feeling it from the fingertip? We are definitely not measuring from the used strength of the muscle. Also you cannot measure the location of the force. With our sensors in the fingertip we are providing richer information that gives us insights into the quality of the grasp.
We successfully demonstrated object grasps with the hand…we are able to grasp different objects in size and shape and move it from one place to another. Now we are in the phase of assembling a second version of the prototype with the better mechanical components. The goal is to have new demos and new use cases by the end of August this year…”
M: How do you think Robotic Hand will impact the industry?
M: “A hand can be used for both, applications that require simple grasps as well as for applications that require flexibility. Pick and place operation is the most widely used application in robotics. If we have a production line where we have different products coming on the line, it is preferred to have a hand that is able to manipulate each of them. Another interesting application could be machine tending. If a company is manufacturing metal parts with various size shapes, a robotic hand that can manipulate all of the objects with one tool, i.e. hand, would easily increase the level of automation in the production process. The conclusion is, our hand can be used for different applications — whoever requires a robot with a hand that has a capability to pick and manipulate objects of different shape, and weight.”
M: What would you say is the ultimate benefit of the Robotic Hand on the business side?
M: “Clients do not want to buy a technology that will not do the job for them. We want to go for the business model that will simplify clients’ decision for investing in automation by charging for what the robotic hand accomplished, i.e. a charge per outturn.”
M: Do you plan to work (partner) with HTEC Group on any other projects some time in future?
M: “We are already collaborating on one project and I’m sure that our future collaboration will bring much value and great results not only to us but also to our future clients.”
Author
Related articles


Next Success Story
-

STYNGR: Enriching the in-game user experience with the power of music
STYNGR cooperates with all significant rights holders, such as Warner, Sony, Universal, and many others, to provide users with pre-cleared music, eliminating the need for going through complex licensing procedures. STYNGR partnered with HTEC to augment their existing services and technical infrastructure, extend their portfolio, and expand their user base and offerings.
-

Case Study: Building a digital platform to enable swift shipping for ecommerce
Our client, a dynamic startup on a mission to bring enterprise-grade, blazing-fast logistics and sorting capabilities to small and mid-sized ecommerce retailers, faced the challenge of building a platform to efficiently manage global shipments.
-

Case Study: A technology-enabled digital transformation for a fix-and-flip real estate business
Informed decisions based on timely, reliable, and secure data are vital in real estate. Learn how HTEC built a digital platform designed to derisk, optimize, and automate a real estate business.